

Dados os recentes avanços em visão computacional, processamento de imagens e sistemas de controle, os veículos inteligentes têm sido um dos tópicos de pesquisa mais promissores e desafiadores da atualidade. Esta tecnologia tem um impacto direto na qualidade de vida e na mudança de comportamentos sociais, continuando assim a ser uma área promissora para a indústria. Mesmo com o atual cenário otimista para este tipo de plataforma robótica, ainda há muitos desafios relacionados à segurança que precisam ser enfrentados para viabilizar essa tecnologia.
Nesse contexto, métodos robustos de controle e filtragem são primordiais para lidar com as mudanças dinâmicas associadas às incertezas paramétricas e distúrbios externos que atuam no modelo do veículo. No entanto, essas técnicas muitas vezes requerem alguma modelagem ou estimativa das incertezas do sistema, o que não é uma tarefa fácil. É necessário, portanto, contornar tais inconvenientes por meio de abordagens capazes de minimizar os efeitos danosos de distúrbios e incertezas, mantendo a estabilidade geral do veículo. Por outro lado, sensores incorporados, como LiDARs e câmeras, fornecem informações valiosas para tomada de decisão e planejamento de caminho para navegação autônoma. Pensando nisso, nosso laboratório tem apresentado resultados notáveis referentes à robustez de operação e processamento das informações dos sensores.
Ao longo do restante desta seção, exibiremos nossos recursos de hardware e software e uma compilação de resultados bem-sucedidos alcançados com relação a percepção, planejamento de trajetória, filtragem e controle.
O LASI, juntamente com o Laboratório de Robótica Móvel (LRM-ICMC-USP), tem pesquisado técnicas no estado da arte para plataformas auônomas terrestres desde 2011. Até então, participamos ativamente do processo de automação e incorporação de inteligência de vários projetos, incluindo parcerias com a Vale S.A. e Scania Latin America. Nosso grupo foi o primeiro na América Latina a desenvolver um veículo pesado de automação nível 3, mais especificamente, um caminhão Scania G 360 CB6x4HSZ (Fig. 1). Mais recentemente, iniciamos a automação de nossa mais nova plataforma, um veículo Ford Focus Titaninum 2018, para aplicações em cenários urbanos e rodoviários (Fig. 2).
Como pode ser observado na Fig. 1 e Fig. 2, realizamos várias modificações no aspecto externo e interno dos veículos para posicionamento dos sensores, e para acomodar os sistemas de distribuição de energia e os recursos computacionais. Nossos conjuntos de sensores em ambas as plataformas apresentam LiDAR, radar, câmeras monoculares/estéreo, distribuídos espacialmente, para minimizar regiões de ponto cego (blind-spots), e sensores GNSS RTK e IMU para obter as informações quanto a localização & orientação. Na automação das funções de direção, empregamos diferentes estratégias (injeção de mensagens CAN, emulação eletrônica dos sinais dos sensores, acionamento direto nos pedais) nos sistemas de aceleração, freio e esterçamento, permitindo realizar o controle lateral e longitudinal do veículo.
Dada a complexidade intrínseca da tarefa de condução, a presença de elementos dinâmicos no ambiente e os altos padrões de segurança que tais plataformas devem satisfazer, a enorme quantidade de dados capturados pelos sensores precisa ser filtrada e processada com eficiência e rapidez. Para conseguir isto, uma arquitetura de software à prova de falhas precisa ser capaz de interagir e trocar informações, de forma assíncrona e paralela, entre diferentes sistemas de sensoriamento, algoritmos de inteligência e sistemas de acionamento. Inspirados por plataformas reais, neste documento, apresentamos os trabalhos desenvolvidos em nosso laboratório de acordo com os principais módulos/tarefas de um veículo autônomo: percepção, planejamento de movimento, filtragem e controle.

Figura 1: Conjunto de sensores e atuadores para automação do SmartTruck.
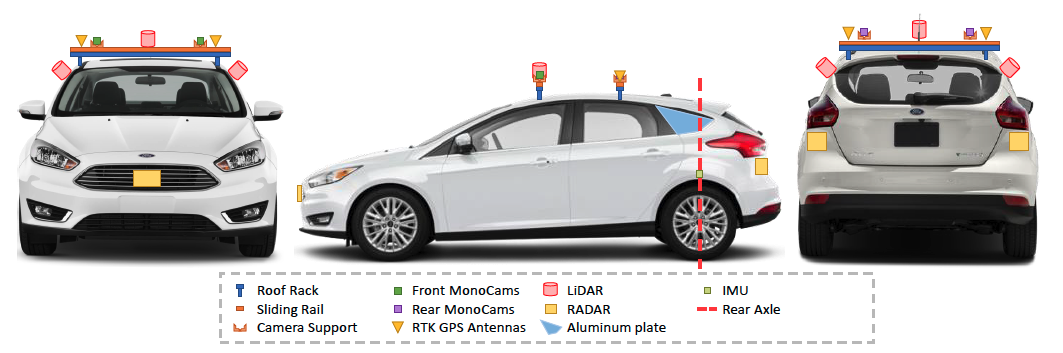
Figura 2: Conjunto de sensores do Ford Focus.
Detecção de pedestres é um tarefa de percepção importante para veículos autônomos com potencial para salvar vidas. Os autores de [1] estudaram o estado da arte em detecção visual de pedestres na época, e avaliaram a aplicabilidade de sistemas de detecção de pedestre para veículos autônomos considerando uma tarefa de frenagem para evitar colisões. Nessa análise foram consideradas a velocidade e dinâmica do veículo, o tempo de processamento, e o desempenho dos detectores. A partir do estudo e análise do desempenho dos métodos existentes, propuseram um arranjo de câmeras estéreo que pudesse melhorar a detecção de pedestre distantes do veículo (veja Fig. 3) [2]. O sistema proposto, composto de dois sistemas estéreos com distâncias focais e linha de base distintas, melhorou o desempenho de recall em 79% em relação a um sistema estéreo comercial (Bumblebee). Experimentos foram feitos com o veículo autônomo CaRINA II em desenvolvimento na Universidade de São Paulo.
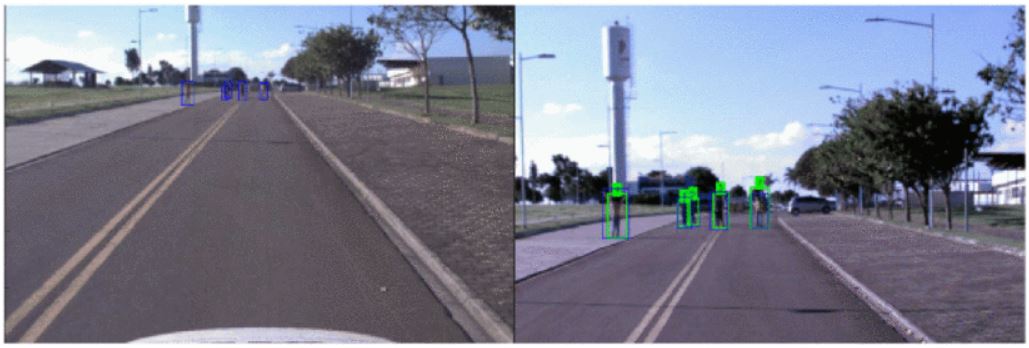
Figura 3: Exemplo de detecção de pedestres por volta de 50 m na frente das câmeras. Esquerda: Câmera estéreo Bumblebee. Direita: sistema proposto.
A odometria visual possibilita a recuperação do movimento relativo de uma ou mais câmeras a partir da sequência de imagens fornecidas. Estas informações podem ser utilizadas para auxiliar na localização de robôs e veículos autônomos usando câmeras embarcadas. Os autores em [3] propuseram um método de odometria visual que utiliza um sistema de câmera omnidirecional embarcado no veículo CaRINA II. Este sistema é composto por múltiplas câmeras, nas quais o movimento de cada câmera é estimado e, a cada instante, é selecionada a melhor avaliação para estimar o movimento do veículo. Este sistema, apesar de ser computacionalmente mais caro, provou ser melhor que o uso de apenas uma câmera embarcada no veículo.

Figura 4: Exemplos de predição da rede para detecção de marcas rodoviárias.
A detecção visual da sinalização horizontal de trânsito pode ser usada por sistemas avançados de assistência ao motorista (ADAS) para manter o veículo em uma pista ou avisar se o motorista está saindo dela. Um dos desafios deste problema está em segmentar corretamente os pixels de uma sinalização horizontal apesar do alto contraste entre as regiões sombreadas e regiões iluminadas. Em [4], uma rede neural convolucional foi proposta para segmentar a sinalização horizontal de trânsito de forma confiável e robusta à variação da iluminação. Os resultados experimentais do sistema de detecção são mostrados na Fig. 4.
Estimar a profundidade de uma cena a partir de uma única câmera é outro problema desafiador. Redes convolucionais profundas têm sido usadas para resolver o problema SIDE (Single Image Depth Estimation). No treinamento supervisionado para tarefas SIDE, a qualidade das predições está relacionada com a qualidade do conjunto de treinamento. Os conjuntos de treinamento formados por imagens e informações de profundidade coletadas pelo LiDAR têm um nível muito alto de esparsidade. Em colaboração com a Universidade de Sydney, Rosa et al. [5] propuseram um método que usa mapas de ocupação contínuos para densificar os mapas de profundidade obtidos por LiDAR (Fig. 5), por meio de mapas Hilbert, utilizando-os durante o treinamento de supervisionado de uma rede neural profunda para estimar profundidade (baseada na ResNet). Os resultados obtidos demonstram os benefícios na qualidade da estimativa fornecida pelo método de densificação.
Na continuação deste trabalho, e com um objetivo semelhante, Mendes et al. [6] propuseram um método para completar a informação de profundidade (Depth Completion) utilizando operadores morfológicos em vez de mapas de ocupação contínua. Uma extensa e detalhada revisão da literatura sobre o estado da arte na área de estimativa de profundidade monocular para navegação autônoma de veículos foi apresentada em Mendes et al. [7]. O trabalho também apresenta uma nova arquitetura CNN multi-tarefa chamada DenseSIDENet (DSN), que prevê informações de profundidade e normal de superfície usando módulos computacionalmente mais leves. Os resultados obtidos têm uma qualidade comparável ao estado da arte em preenchimento de profundidade, odometria visual (VO) e tarefas SIDE, esta última pode ser vista na Fig. 6.

Figura 5: (a) Mapa de profundidade tradicional; (b) Nosso mapa de referência densificado utilizado para supervisionar a CNN.
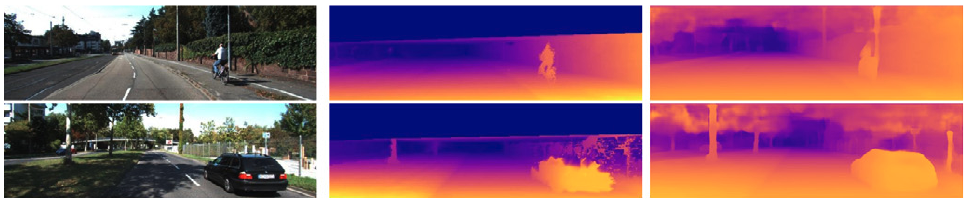
Figura 6: Estimativa monocular de profundidade – DenseSIDENet (DSN). (a) Entrada RGB; (b) Mapa de profundidade de referência (c) Predição da DSN.
Em Silva et al. [8], desenvolvemos um método para gerar e armazenar de forma compacta a descrição topológica e geométrica do mapa das vias de trânsito. Uma das contribuições do trabalho está no método, que gera, a partir de uma representação densa dos pontos da estrada, uma representação esparsa da geometria da estrada usando pontos de controle usados na interpolação por clotóides. Clotóides são curvas parametrizadas por curvatura. O método proposto planeja uma rota global com curvatura contínua utilizando sequências de clotóides que utilizam os pontos de controle armazenados no mapa esparso gerado (ver Fig. 7). A continuidade e linearidade da curvatura resultam em um caminho que, quando percorrido, requer menos esforço na direção do veículo, e as limitações impostas à derivada da curvatura resultam no conforto do passageiro. Outra contribuição do método desenvolvido é o planejamento da rota para mudança de faixa, também com curvatura contínua e dentro de um limite de distância especificado. Os resultados experimentais foram obtidos utilizando o CarINA II, um veículo autônomo em desenvolvimento na Universidade de São Paulo. A abordagem desenvolvida também funciona como um método de planejamento local, adequado para o desvio local de obstáculos.
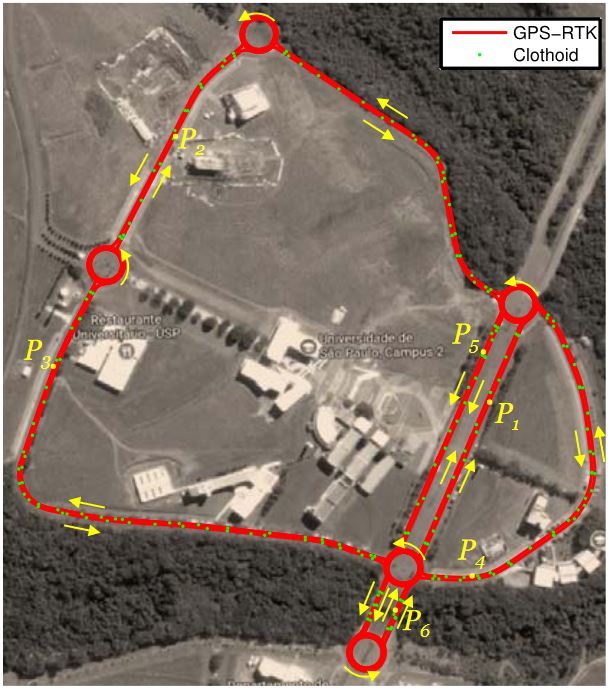
Figura 7: Uma rede rodoviária considerando um mapa real. As linhas sólidas representam o centro das pistas. Dois pontos verdes adjacentes definem um segmento de clotóide.
O laboratório também desenvolveu projeto na área de controle de velocidade de cruzeiro de um veículo autônomo usando um controlador preditivo não-linear baseado em modelo (NMPC) [9]. Ao levar em consideração o perfil de altitude da estrada, a técnica otimiza o consumo de combustível do veículo, apresentando eficiência superior quando comparada a controladores padrões de velocidade de cruzeiro.
Motivado pelo problema de transporte autônomo de cargas por caminhões, em que há uma grande variação na massa do veículo dependendo da quantidade de carga, os autores em [10] desenvolveram controladores laterais robustos recursivos para veículos autônomos sujeitos a incerteza no modelo paramétrico. Incertezas paramétricas na massa do veículo têm o potencial de diminuir o desempenho do sistema ou mesmo de desestabilizá-lo. Este problema é ainda mais importante para os veículos de carga articulados. Assim, mais recentemente, o método foi ampliado em [11], em que um controlador lateral robusto para veículos pesados articulados foi desenvolvido. Testes de simulação foram realizados considerando uma manobra de mudança de faixa dupla, como ilustrado na Fig. 8. Os resultados mostraram que o controlador proposto forneceu robustez adequada, estabilidade lateral, condução suave e segurança, mesmo na presença de incertezas paramétricas.
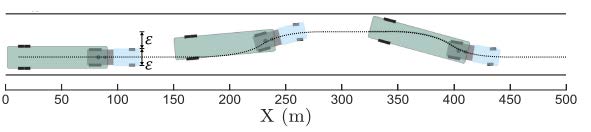
Figura 8: Manobra de mudança de faixa dupla com o caminhão articulado.
As enormes variações na carga do veículo também fazem do controle de velocidade uma atividade crítica para caminhões autônomos. Estes veículos poderiam se beneficiar amplamente de modelos mais precisos que levam em conta as diversas situações de condução, produzindo esquemas de controle mais sofisticados. Por exemplo, a mudança de marcha introduz variações abruptas na dinâmica do veículo. Os sistemas de controle autônomo que não compreendem completamente estas mudanças podem produzir acelerações desnecessárias ou acelerações insuficientes, especialmente nos instantes próximos a uma mudança de marcha. Além disso, algumas variáveis que não são medidas trivialmente, como a torção do eixo de acionamento, poderiam fornecer informações extras para refinar o controle de velocidade. As mudanças na inclinação da estrada, que afetam muito a aceleração do caminhão, também poderiam ser consideradas. Os autores de [12] propõem um modelo de veículo completo para enfrentar todos estes desafios. Ele oferece robustez contra variações de massa e inclinação da estrada, projetando um método para acionamento do acelerador que está ciente de mudanças de marcha passadas, presentes e futuras. Empregando as técnicas probabilísticas dos processos de cadeira de Markov, conseguimos um modelo longitudinal completo do caminhão, e é possível estimar a torção do eixo de acionamento com precisão e robustez. Isto leva ao desenvolvimento de um sistema de controle de velocidade que garante estabilidade e rastreamento de velocidade de alta qualidade em situações adversas.
No trabalho descrito em [13] os autores aplicaram processos gaussianos para estimar o modelo dinâmico de um caminhão pesado, juntamente com incertezas paramétricas. O modelo foi identificado com base em um conjunto real de dados experimentais adquiridos enquanto o caminhão estava em operação. Os autores projetaram um controlador preditivo de modelo longitudinal e depois realizaram testes de simulação com o modelo estimado de caminhão. O controlador proposto alcançou baixo erro de rastreamento mesmo em condições difíceis, como estradas íngremes [14].
Um dos desafios em andamento no que diz respeito à navegação autônoma é o desenvolvimento de técnicas de controle baseadas em visão para os agentes autônomos e, neste sentido, algumas pesquisas em desenvolvimento propõe soluções de controle que combinam técnicas baseadas em aprendizagem de máquinas com métodos de controle baseados em modelo.
Neste contexto, os autores de [15] propõe um modelo híbrido que funde a Aprendizagem por Reforço Profundo (DRL) com um Regulador Linear Quadrático Robusto (RLQR), aplicado no controle lateral de veículos autônomos baseados em visão. O modelo proposto utiliza algoritmos de aprendizagem de máquinas para extração de características, posteriormente, estes valores são interpretados como medidas de erro a serem minimizadas pelo controlador. Devido à dinâmica desconhecida do sistema, foi utilizada uma busca evolutiva para estimar as matrizes de incerteza do sistema. As entradas para cada controlador são imagens de câmeras RGB segmentadas semanticamente em tempo real, como apresentadas na Fig. 9, que servem como base para calcular ações de esterçamento contínuas para manter o veículo no centro da pista com uma velocidade constante. Os resultados das simulações mostram que a arquitetura híbrida proposta supera os outros algoritmos implementados. Ela apresenta erros de rastreamento menores, entradas de direção mais suaves, prevenção total de colisões e melhor generalização em novos ambientes urbanos. Além disso, diminui signifcativamente o tempo de treinamento necessário.
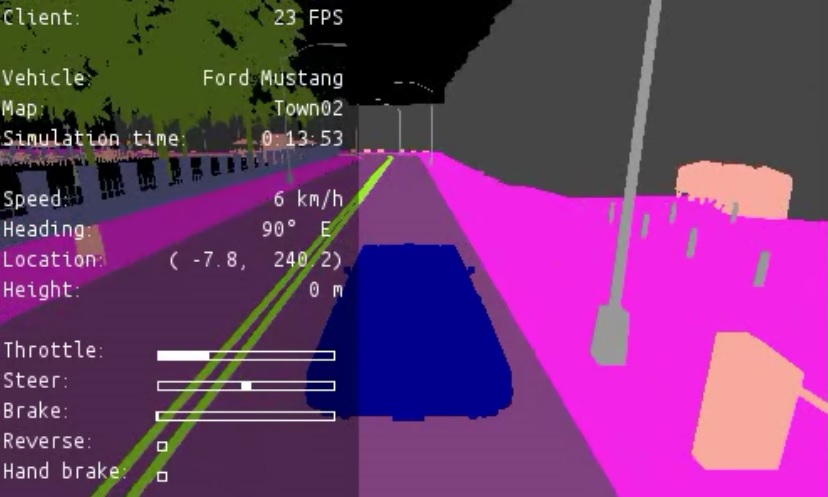
Figura 9: Imagem de referˆencia de segmenta¸c˜ao semˆantica em ambiente de simula¸c˜ao.
O trabalho proposto em [16] apresenta um projeto de controle lateral robusto para seguir caminhos. As incertezas paramétricas do modelo são defnidas por algoritmos de otimização evolutivos que consideram apenas medições de entrada e saída, sem a formulação matemática da dinâmica do sistema. O modelo de otimização foi projetado para minimizar o erro de deslocamento lateral, o erro de taxa de guinada, o erro de deslocamento de guinada e o erro de orientação de um veículo pesado articulado em um ambiente de simulação.
Atualmente, o laboratório desenvolve novas técnicas de filtragem robusta e estratégia de controle para sistemas com modelos incertos. Os resultados preliminares obtidos em [17], [18], [19], [20], [21], [22] e [23] mostram melhorias consideráveis em relação aos métodos existentes, indicando potencial de aplicação em plataformas robóticas, tais como veículos autônomos terrestres e aéreos. Em particular, filtragem robusta desempenha um papel importante na estimação do estado do veículo. Através da fusão de informação e redes de sensores [24, 25], os dados fornecidos pelos diversos sensores disponíveis podem ser usados para melhoria da acurácia da estimação. Além disso, o desenvolvimento de estratégias tolerantes a falha podem aumentar a confança geral do sistema, por exemplo, em situações em que as condições de operação de um ou mais sensores não são ideais ou estão sujeitas a falhas. Nesse sentido, a navegação se torna signifcativamente segura enquanto damos um passo a mais na direção de um nível maior de automação.
A pesquisa em robótica aérea no LASI começou com quadrirotores comerciais, devido a sua rápida usabilidade e autonomia out-of-the-box. Desde então, foram feitos progressos contínuos no campo do controle robusto e técnicas de filtragem usando um sistema de rastreamento de movimentos para medições precisas de referência. Nossa experiência, em colaboração com estudantes e pesquisadores da Universidade Federal de São Carlos (UFSCar) e o Departamento de Engenharia Mecânica do CESE-USP, nos levou a criar a equipe Flying U2, uma equipe multidisciplinar para participar de competições de robótica aérea, obtendo reconhecimento nacional e internacional. Mais recentemente, devido à expansão das pesquisas no campo da robótica aérea, uma plataforma personalizada de UAV foi construído para permitir diferentes desenvolvimentos de pesquisa, tais como localização e mapeamento interno/externo, e flexível combinação sensorial.
Atualmente, estamos trabalhando com duas plataformas UAV diferentes, o Bebop 2 da Parrot e um F450 personalizado. O primeiro é um quadricóptero comercial composto por GPS, uma câmera monocular olho de peixe e um sistema de odometria baseado em fuxo óptico e uma IMU. Um Raspberry foi colocado no topo do Bebop 2 para permitir o processamento embarcado do sistema autônomo sem depender de uma estação terrestre.
A segunda plataforma é o F450. Este UAV foi construído para aplicações mais complexas, que requerem poderosos CPU, GPU e sensores adicionais. O sistema F450 é composto por uma placa NVIDIA Jetson, uma câmera estéreo e GPS Real-Time Kinematic (RTK) para localização externa precisa. A velocidade dos motores é ajustada usando um controlador de voo embarcado, que possui uma IMU incorporada e um sensor externo a laser para pairar.
As simulações são importantes para acelerar o desenvolvimento de sistemas autônomos e garantir maior segurança. Nesse sentido, nosso laboratório utiliza alguns simuladores para VANTs autônomos, como Parrot-Sphinx e MRS, juntamente com a plataforma Robot Operating System.
O simulador Parrot Sphinx foi desenvolvido pelos engenheiros da Parrot TM e atualmente está disponível como uma plataforma de código aberto para simular vários modelos de aeronaves. Além de simular a cinemática, este simulador considera a dinâmica da aeronave com alta precisão. Permite a visualização de dados de voo e a configuração de características físicas do ambiente, como velocidade linear do vento e parâmetros gerais da atmosfera. Usamos esta ferramenta, especialmente para testes preliminares e validação dos algoritmos de controle e mapeamento desenvolvidos. O Grupo MRS desenvolveu uma plataforma de código aberto no Departamento de Cibernética da Universidade Técnica Tcheca. O Sistema MRS UAV é uma plataforma que possibilita simulações realistas e o controle de múltiplos UAVs em um ambiente Word real. Nosso grupo de pesquisa utiliza o sistema MRS UAV para validar os algoritmos de controle, mapeamento e estimativa.
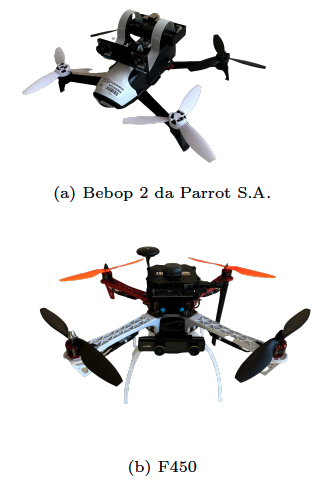
Figura 10: Plataforma de veículo aéreo não tripulado do LASI.
Conhecer o modelo dinâmico dos VANTs é importante para implementar controladores mais elaborados. Ao longo dos anos, modelos simplificados foram propostos para facilitar a implementação de controladores e surgiram novas técnicas para identificação e estimativa de parâmetros. Nesse sentido, [26] propôs uma técnica para estimar os parâmetros de quadrirrotores comerciais usando o método dos mínimos quadrados.
Motivado pelo problema de rastreamento de trajetória de UAVs autônomos, [27] desenvolveu um pacote ROS equipado com controladores nominais: Regulador Linear Quadrático (LQR), Linearização por Feedback (FL) e Proporcional-Integral-Derivativo (PID). Além disso, foi adicionado um controlador LQR robusto, desenvolvido em [28], que considera incertezas paramétricas existentes e permite realizar rastreamento melhor do que os controladores nominais implementados.
Além das incertezas paramétricas, os UAVs também são afetados por distúrbios externos. Nesse sentido, em [29] propõe uma arquitetura que trata não apenas de incertezas paramétricas, mas também de distúrbios do vento. Nesse caso, a arquitetura combina o controlador LQR robusto com observadores de perturbação, o que agrega ainda mais robustez ao sistema e reduz o erro de rastreamento de trajetória.
Considerando arquiteturas híbridas que combinam controladores robustos com RNAs de redes neurais artificiais, no trabalho de [30] foram desenvolvidas duas arquiteturas para rastreamento de trajetória com VANTs. Neste caso, o controlador lida com incertezas paramétricas e as RNAs com perturbações externas, como rajadas de vento. Em uma das arquiteturas, a rede neural fornece um sinal de referência viável ao controlador, fazendo com que o VANT convirja para a trajetória desejada mesmo sob distúrbios externos. Na segunda arquitetura, a RNA atua como um estimador de distúrbios externos, eliminando a necessidade de adicionar filtros e consequentemente reduzindo a complexidade da arquitetura.
Nestes trabalhos apresentados, tanto a simulação quanto os resultados práticos mostraram uma melhora significativa no rastreamento de trajetória de UAVs sujeitos a incertezas paramétricas e rajadas de vento. A redução do erro de trajetória possibilitou melhorar a segurança, robustez e estabilidade do voo autônomo. A Fig. 13 apresenta a visão 3D do rastreamento de trajetória em um experimento prático realizado quando a aeronave está sujeita a rajadas de vento com os controladores autônomos e nosso algoritmo desenvolvido.

Figura 11: Bebop 2.0 quadrotor in Parrot-Sphinx
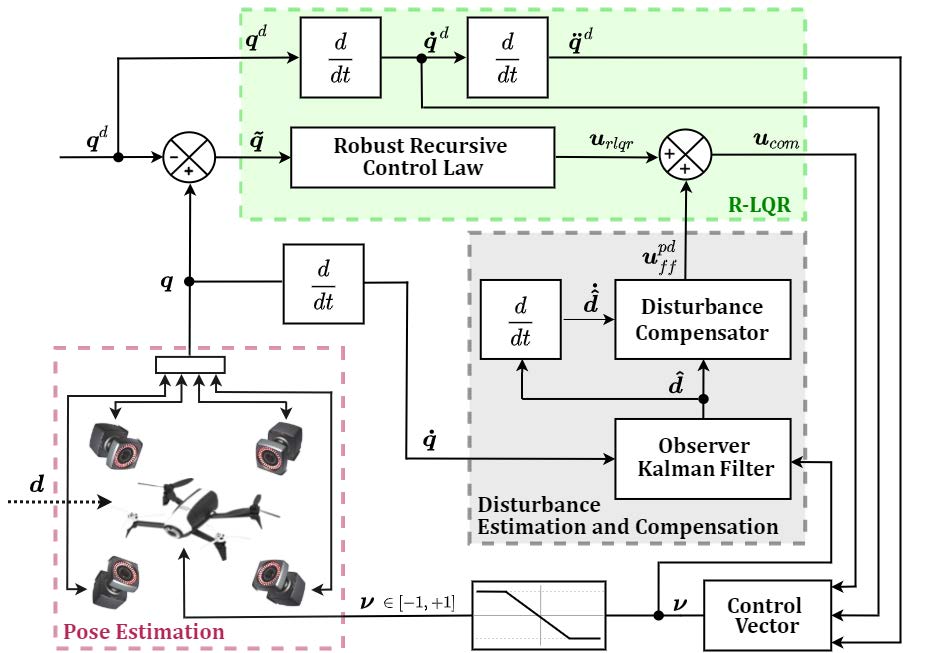
Figura 12: Diagrama de blocos do controle baseado em observador de perturbação com R-LQR e filtro de Kalman [29].
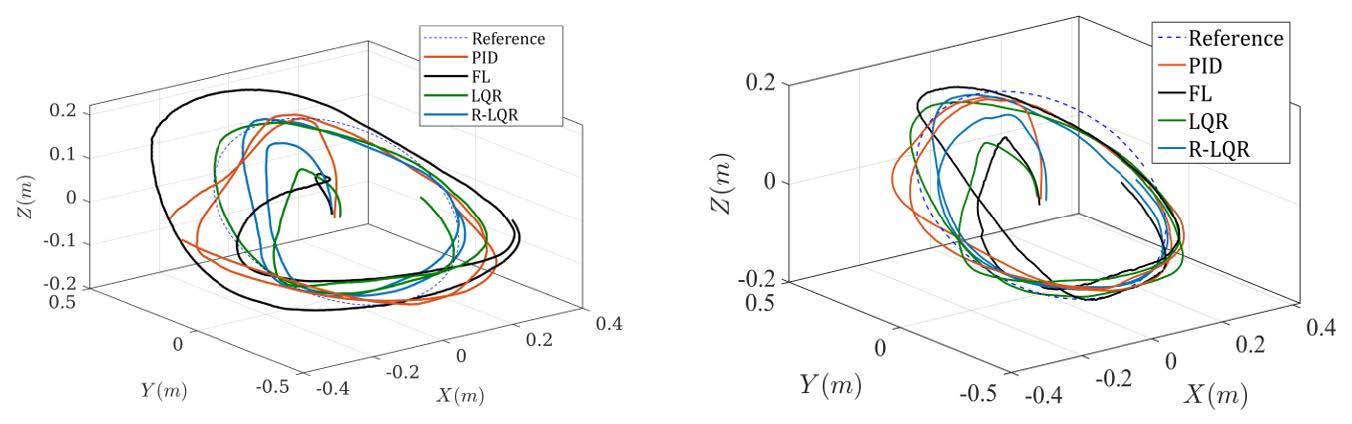
Figura 13: Rastreamento de trajetória sob distúrbios de vento. (a) Controladores independentes. (b) Arquitetura proposta.
Fusão de sensores desempenha um papel importante no campo da localização e mapeamento, combinando medições de diferentes sensores, como IMUs, câmeras e GPS, para fornecer posição e orientação do robô. Entretanto, quando um sensor não está disponível ou suas medições são ruidosas ou foram corrompidas, ele pode diminuir a precisão da estimativa, levando a uma localização incorreta. Uma solução para este problema é modelar o sistema de navegação como Sistemas lineares de saltos Markovianos em tempo discreto e usar uma abordagem de Filtro Kalman Estendido. Assim, ele pode reduzir a degradação do desempenho da fusão de sensores, escolhendo os modos de operação ou o estado de Markov do sistema de navegação com base na disponibilidade e confiabilidade dos sensores [31]. Uma versão estendida deste trabalho, apresentada em [32], utiliza um Filtro Kalman Robusto (RKF) para reduzir o impacto das incertezas paramétricas nos modelos do sistema, o que melhora a precisão geral da estimativa de localização.
Micro Veículos Aéreos (MAVs) comerciais geralmente dependem de medições GPS para tarefas de navegação autônoma. Uma limitação desta solução é que em algumas áreas urbanas ou ambientes internos, o sinal GPS não está disponível, o que compromete sua localização. Uma solução conveniente seria usar o sistema de odometria do MAV para feedback de posição e orientação, no entanto, os sensores inercial tendem a derivar com o tempo, o que pode levar a medições incorretas. Assim, em [33] foi apresentado um sistema de navegação baseado em localização e mapeamento simultâneo visual monocular (vSLAM), o qual mitiga os problemas acima mencionados. A escala métrica para a posição vSLAM foi estimada usando um filtro de Kalman, baseado nas informações de odometria. Simulações e resultados experimentais foram apresentados utilizando um MAV comercial para mostrar a eficácia do sistema proposto.
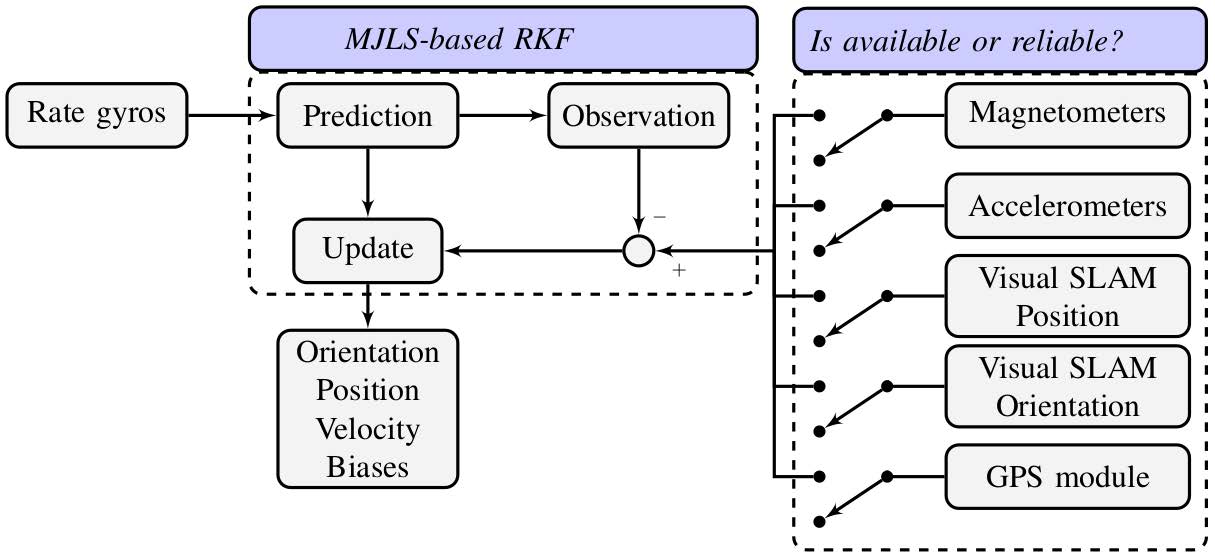
Figura 14: Diagrama do sistema RKF baseado em DMJLS.
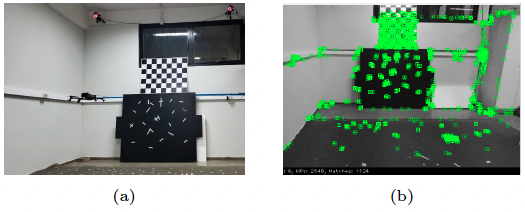
Figura 15: (a) O Bebop 2 durante um vôo na arena equipada com Vicon MTS; (b) Um quadro extraído da câmera do Bebop 2 enquanto executava o algoritmo ORB-SLAM2.
Durante a última década, um interesse crescente no campo de Sistemas de Controle em Rede foi impulsionado não apenas por desafios tecnológicos e teóricos, mas também devido à acessibilidade e popularidade de UAVs. Uma ampla gama de aplicabilidades, como vigilância, entregas e agricultura, fazem dos UAVs, especialmente de quadrotores, um tópico de pesquisa de tendência. Entretanto, projetar estratégias de controle cooperativas para sistemas multiagentes autônomos ainda não é um problema totalmente resolvido. A presença de incertezas paramétricas intrínsecas combinadas com imperfeições da rede dificultam a análise e o projeto de tais sistemas. Portanto, estamos atualmente investigando uma arquitetura de controle em rede que fornece robustez não apenas às incertezas paramétricas no modelo, mas também às falhas de pacotes e atrasos induzidos pela rede. O processo de estimação se destaca por fornecer uma solução direta derivada do Filtro Kalman Estendido, enquanto o sistema de controle é baseado no Regulador Linear-Quadrático Robusto, que fornece uma solução recursiva. A arquitetura é implementada em Robot Operating System (ROS) e as missões de rastreamento de trajetória são realizadas em um quadricóptero Parrot Bebop 2, a fim de mostrar a eficiência do sistema proposto.

A Escola de Engenharia de São Carlos (EESC) é uma das unidades de ensino, pesquisa e extensão da Universidade de São Paulo (USP), instituição pública e de padrão mundial.
INSTITUCIONAL
Área 1 – Avenida Trabalhador são-carlense, 400
Pq Arnold Schimidt – CEP 13566-590 – São Carlos – SP
Área 2 – Avenida João Dagnone, 1100
Jd. Santa Angelina – CEP 13563-120 – São Carlos – SP
CRHEA – Rodovia Domingos Innocentini, Km 13
Represa do Lobo (Broa) – Itirapina – SP
A Escola de Engenharia de São Carlos (EESC) é uma das unidades de ensino, pesquisa e extensão da Universidade de São Paulo (USP), instituição pública e de padrão mundial.
INSTITUCIONAL
Área 1 – Avenida Trabalhador são-carlense, 400
Pq Arnold Schimidt – CEP 13566-590 – São Carlos – SP
Área 2 – Avenida João Dagnone, 1100
Jd. Santa Angelina – CEP 13563-120 – São Carlos – SP
CRHEA – Rodovia Domingos Innocentini, Km 13
Represa do Lobo (Broa) – Itirapina – SP
A Escola de Engenharia de São Carlos (EESC) é uma das unidades de ensino, pesquisa e extensão da Universidade de São Paulo (USP), instituição pública e de padrão mundial.
INSTITUCIONAL
Área 1 – Avenida Trabalhador são-carlense, 400
Pq Arnold Schimidt – CEP 13566-590 – São Carlos – SP
Área 2 – Avenida João Dagnone, 1100
Jd. Santa Angelina – CEP 13563-120 – São Carlos – SP
CRHEA – Rodovia Domingos Innocentini, Km 13
Represa do Lobo (Broa) – Itirapina – SP